Project YLVI – Recap
Our last blog post explained the reasoning behind the YLVI application and the underlying challenges. Additionally, we provided an overview of the solutions ARTI intends to implement in the ongoing YLVI project. A quick recap: YLVI aims to make the deployment of Robotics as a Service (RaaS) applications in the outdoor sector faster and easier.
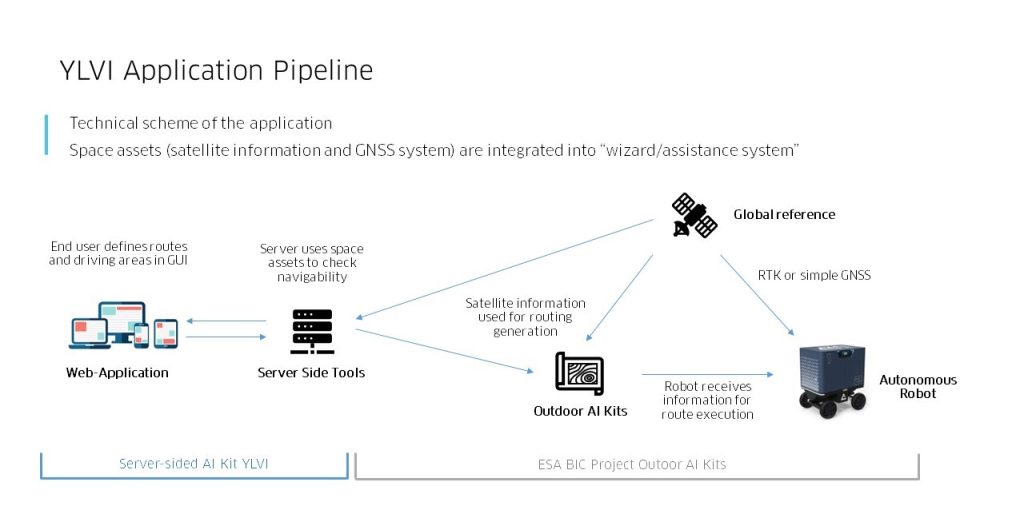
Robotics-as-a-service in this context means that we help our customers set up a framework with their robotic vehicle. Within this framework, the end customer orders a specific task that is then performed by an intelligent and autonomous robot. We at ARTI are developing an assistance tool that uses satellite images and GNSS signal data (RTK) in a GUI. This helps the end user narrow down the respective area of the application and check the suitability of the ground for the application. Subsequently, it reduces deployment time and allows the end customer to monitor the process and participate in the decision-making. Ultimately, it makes the application faster, cheaper and more reliable.
In this second part of the blog post, we now want to focus more on the technological background. Additionally, we focus on the practical application of the YLVI tool and the outlook on the next project steps.
What is the technological background?
It is easy to understand that different situations require different abilities of the navigation software (“skills”). This can be, for example, driving straight ahead, crossing a road, driving particularly carefully or applying faster driving dynamics. The information about the required skills is first directed to the robot’s autonomous skill planner. On this level, the architecture decides on the capabilities needed for task execution. One level below lies the roadmap planner, which chooses a preferred route under the given circumstances. Finally, the robot executes the route.
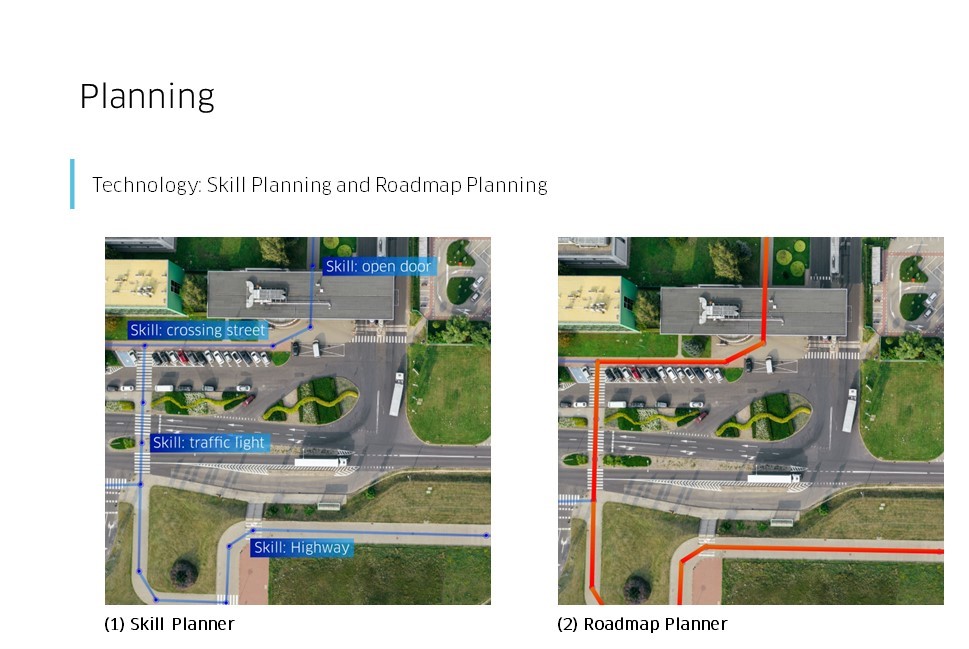
Using the satellite-based sensing data (GNSS), an approximate route has already been generated for the YLVI tool. This route serves in the navigation software as an equivalent for the roadmap. YLVI performs checks through the following steps:
- Setting up topographic and robotic base parameters
- Image segmentation of satellite imagery and mission specs
- Checking the selected route for feasibility
- Avoiding global obstacles (e.g. slopes or heavy gradients,…)
Operation stability is crucial in autonomous robotic outdoor use cases. Thus, the application architecture allows seamless operation with poor or no internet connection. The solution only initially requires an internet connection to provide the vehicle with the necessary information. Once at the deployment site, the vehicle utilizes this preloaded data. A base station is installed to ensure stable RTK GPS functionality if no internet connection is available.
How do I use YLVI as an end user?
Using a satellite image, the end user selects an area in the web app for a specific activity. An example in a similar setting can be found here. The YLVI tool then performs the test steps mentioned above. The end user is then given feedback on the result of the test steps via a GUI as to whether the intended activity is possible and safe in the selected area. If yes, the user can authorise the activity. If not, the user can adjust the task and the workspace in the web app until execution is possible. Important to note is that the final approval for task execution always comes from the operator.
Additionally, the YLVI tool offers the option to define areas using an inverted approach. After the web app and the robot are fully georeferenced and synchronized, the user specifies no-go areas on the satellite image. Through the web app, the user provides the robot with clear and precise instructions on where to carry out the planned activities. The end user can, for example, mow only certain parts of a larger lawn area or apply pesticides only in a specific area of a field. The end user can generally prevent the robot from leaving a site.
Are there already practical examples?
The YLVI project is still ongoing, but ARTI has already been able to test individual features of the YLVI tool in real environments. One particularly striking use case is the SIMPRINT project. We have previously reported on this project. In short, it is about landscape printing. Images can be printed on the ground using a robot, e.g. for advertising purposes. This printing process is to be made easier by integrating YLVI. The end customer uploads the desired image to the web app, edits and adjusts it (scaling, position, transparency, rotation), and then has YLVI check whether the print is safe and possible. The ability to download the image and specifications locally makes the system stable and independent of the internet connection quality. After verification by YLVI, the end user can release the print start and monitor the progress.
What is the current project status, and what’s next?
ARTI has just completed the mid-term report and presented the first successes and the overall project progress. The YLVI features and functionalities are in place. The next few months of the project will see optimisation, incorporating additional functions and extensive testing. At the end of this year, we’ll present the results of the YLVI project to the public!
Partners

ARTI – Autonomous Robot Technology GmbH and the YLVI Project have been supported by ESA Space
Solutions and ESA Space Solutions Centre Austria through the ESA Spark Funding Austria initiative.

