Outdoor tasks: The challenge for mobile robotics
Countless arduous outdoor activities can be improved and simplified through autonomous mobile robotics. For this reason, ARTI works on the satellite-supported mission verification tool YLVI. The use case spectrum ranges from agriculture, construction, and maintenance to civil defence rescue missions. What all these scenarios have in common is a different and changing environment, as well as the need for quick and uncomplicated deployment. The user should not have to make complex and time-consuming adjustments between the robot arriving on site and starting work.

Where outdoor robots and the operational environment meet
In our development work at ARTI, we differentiate two work areas. On one hand, the activities which directly affect the robot and its software (edge). On the other hand, there are activities dealing with the robot’s operating environment (environment). The point at which edge and environment meet is called deployment. This point deals with check-ups, installation, configuration, usability and operability as well as training and support. Particularly in the outdoor sector, this point can sometimes be lengthy due to the dynamic and complex environment. Robotic experts deploying robots outdoors must consider many different scenarios and factors. This activity also often requires expert know-how about the capabilities and limitations of the vehicle and the software.
Deployment as a challenge with RaaS?
Such a complex deployment process complicates many Robot-as-a-Service applications in the outdoor sector. For the providers of such service robots, the scalability of their services is crucial and it deteriorates if they have to count in additional personnel and time for deployment. Moreover, the end customers of the robotic services want a simple and quickly deployable system with expert support only being necessary when problems arise.
ARTI is trying to alleviate these difficulties in the deployment of outdoor robots through the YLVI project. The main asset of the solution is the use of space technology. The project runs in the framework of the ESA Spark Austria programme, with our local contact being the amazing Spacesolutions team at Science Park Graz, who also supported us in the past. The YLVI projects does not stand alone, but builds upon results of previous work in the field of outdoor robotics. The ESA Business Incubation Programme supported this work and made the development of AI Kits for outdoor robotics possible. We want to take this opportunity to thank them for their support during the application and work process!
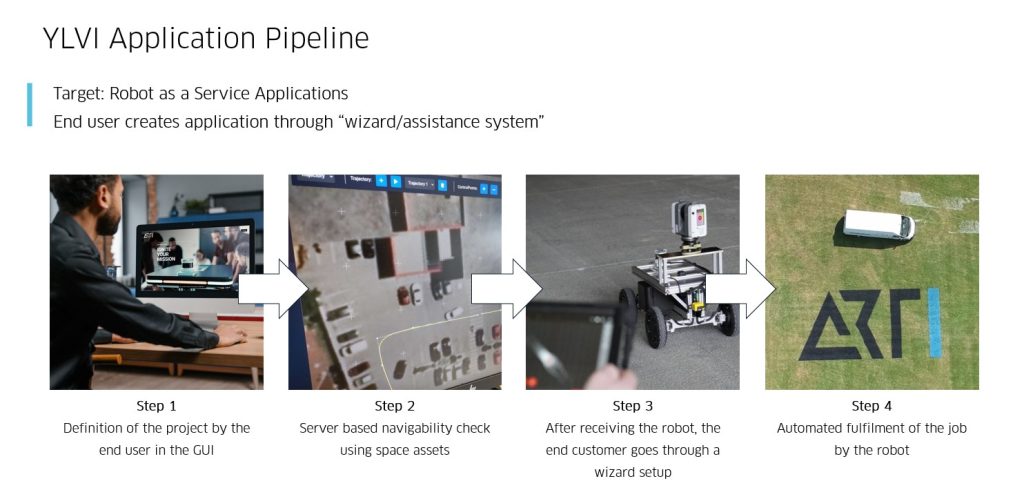
Satellite-supported mission verification: What is the core content of the YLVI project?
The aim is to develop an assistance tool that supports the end user during deployment. For this cause, ARTI developers integrate satellite images and GNSS signal data, especially RTK-GPS (Real Time Kinematic-GPS), into the navigation for outdoor robotics. A web app’s graphical user interface (GUI) makes the process easily accessible and understandable for the end user. The human-machine interaction of the wizard focuses on a smooth process and the greatest possible freedom of design for the end user in the application.
By integrating satellite and GNSS data, the end user can define through a web app the areas in which the robot should move. Similarly, the user defines the areas where the respective activity should be carried out. The YLVI application then uses satellite data to check the topological suitability of the movement area and whether there are any severe obstacles to carrying out the activity. The end user should also be able to track the robot’s activity and movements.
Robotics as a Service (RaaS) models are quickly becoming the future of outdoor robotics due to their scalability, cost-effectiveness, and flexibility. RaaS allows businesses to leverage advanced robotic technology without the hefty initial investment in hardware, enabling more companies to implement sophisticated solutions for tasks like agricultural monitoring, surveying, and environmental scanning. This model not only reduces entry barriers but also allows for rapid adaptation to new technologies and market demands, proving indispensable for outdoor applications where conditions and requirements can change swiftly.
Partners

ARTI – Autonomous Robot Technology GmbH and the YLVI Project have been supported by ESA Space
Solutions and ESA Space Solutions Centre Austria through the ESA Spark Funding Austria initiative.

