Autonomous Robots need maps for navigation
Mobile autonomous robots require precise and up-to-date maps of their surroundings to localize and orient themselves as they move around. That is the state-of-the-art and technologically feasible. In practice, the driving environment is recorded once, usually with LiDAR sensors, and a map is created from this information. The process is called SLAM – Simultaneous Localization and Mapping. The generated map is then rolled out on the robot and serves as the basis for autonomous navigation.
However, this is not trivial when the environment changes. In other words, when dynamic or static obstacles appear, the entire environment map has to be re-recorded. Subsequently, the map has to be transferred to the robot. However, this process is very time-consuming. It is particularly troublesome, if the environment changes frequently, if the map covers a large area, or a bigger fleet of autonomous vehicles.
Dynamic environments create problems
But even if a robot can record a map while actively driving (using SLAM technology, for example), it does not solve the issue. Still, problems exist in recognizing environmental changes and changing the map material accordingly for navigation. Even more, the newly updated maps have to be rolled out and applied by the entire fleet of robots.
Research Project LOKI: automatic map updates for dynamic environments
And here we come to LOKI. It is the name of a research project that ARTI has worked on over the past three years. The project dealt with exactly the problem mentioned above and received funding from the FFG, the Austrian Research Promotion Agency. In the LOKI research project, ARTI’s robotics experts worked on automatic map updates and their roll-out using a server-side AI Kit. The project aimed to create an “observation loop” of the operational environment.
In simple terms, a localized mobile vehicle records the environment with sensors and transfers the information to a special map server. For the automated map updates, this map server then creates a map. When the mobile robot enters the environment again, the same process starts. The map server then compares the newly created map with the existing map. If the environment has changed in the meantime, the server-sided AI-Kit LOKI recognises this change.
Subsequently, the map server incorporates the new information into the map. The server then transfers the map back to the robot, and the loop starts again. Because a server creates the map, not the robot itself, it can easily distribute the newly generated map to the entire robot fleet. Furthermore, this approach makes it possible to delete dynamic objects or incorrect measurements from the map filter. The result is an increasingly clear picture of the static environment over time.
Detecting dynamic changes
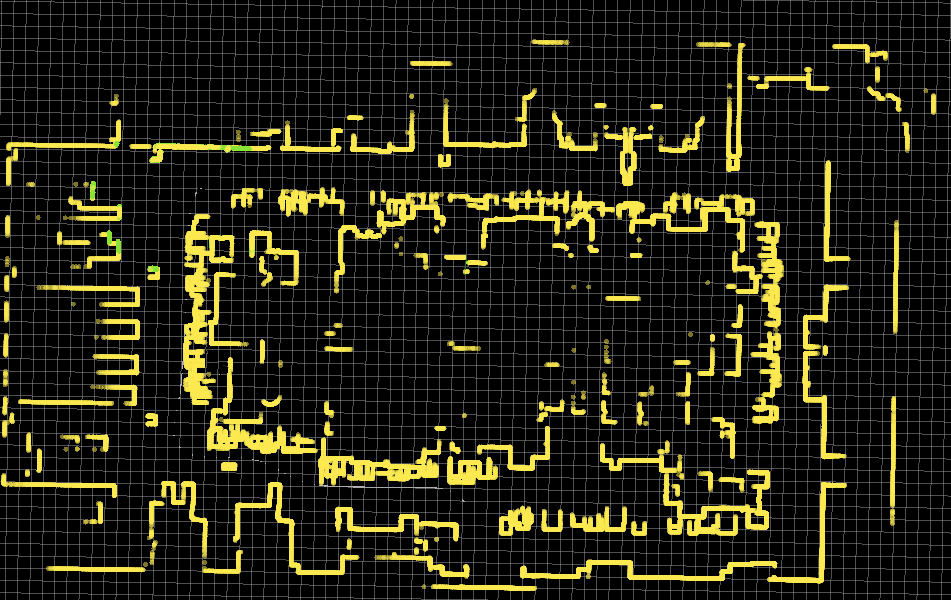
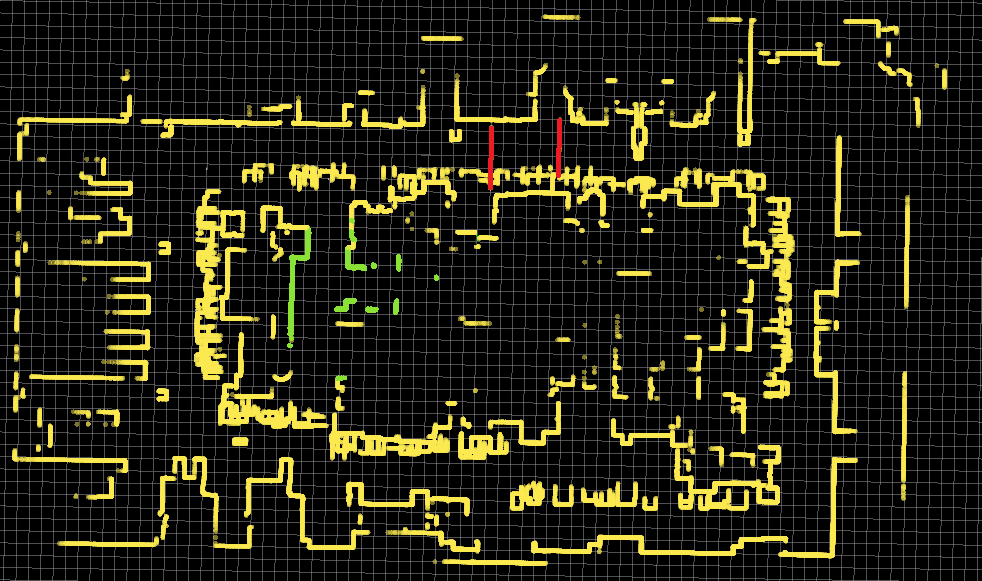
The following pictures show the detection of dynamic changes of a robotic environment, calculated in a simulation:
When used in industrial environments, such a tool is beneficial and creates efficiency in workflows and processes. Dynamic changes happen even in seemingly constant industrial environments, such as high-bay warehouses or production halls. Shelves are assembled or dismantled as required, and gates open or closed. If autonomous navigation is not based on up-to-date map material, such static obstacles can cause time-consuming disruptions to transport processes.
New fixed structures, such as shelves, are an additional aid for the robot thanks to LOKI, not a disruptive factor for its precision anymore.
Clemens Mühlbacher, Head of Research

LOKI Research Topic: automatic map updates between the robot and the server
During the experimental development of the LOKI Kit, the ARTI developers paid particular attention to the issue of data transmission between the mobile robot and the server. When the robot records the environment, the sensors generate substantial amounts of data. However, updating the map material as quickly as possible is crucial for autonomous navigation. Therefore, it is essential only to forward the minimum amount of data the server needs to perform the automatic map update cycle. In addition, data transmission must be as secure as possible and independent of the connection quality. It also applies to retransmitting the environment maps to the individual robot. To this end, the research project ensured secure transmission based on established standards. It was essential to use a volume of data that does not overload the infrastructure, even if the connection is poor.
Another feature that ARTI focused on during development is flexible usability. The LOKI “pipeline” is also capable of transferring other data types. For example, it does not matter whether it is 2D or 3D data. The same “pipeline” can also process log data for statistical evaluation. In the future, the pipeline will also distribute other changes in the environment via a server. These changes can, for example, include changes in current traffic jam information.
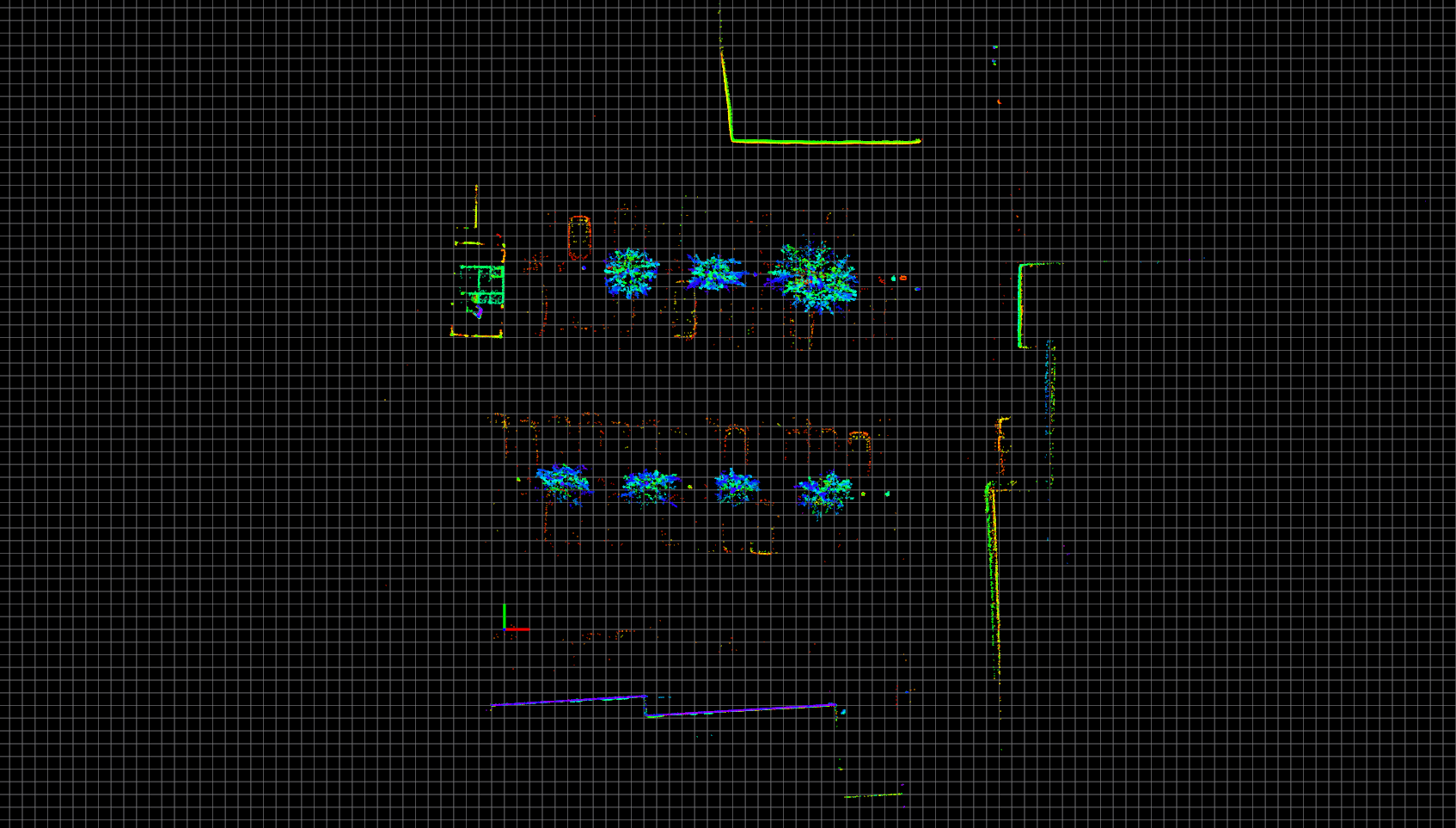
Creating 3D pointcloud maps
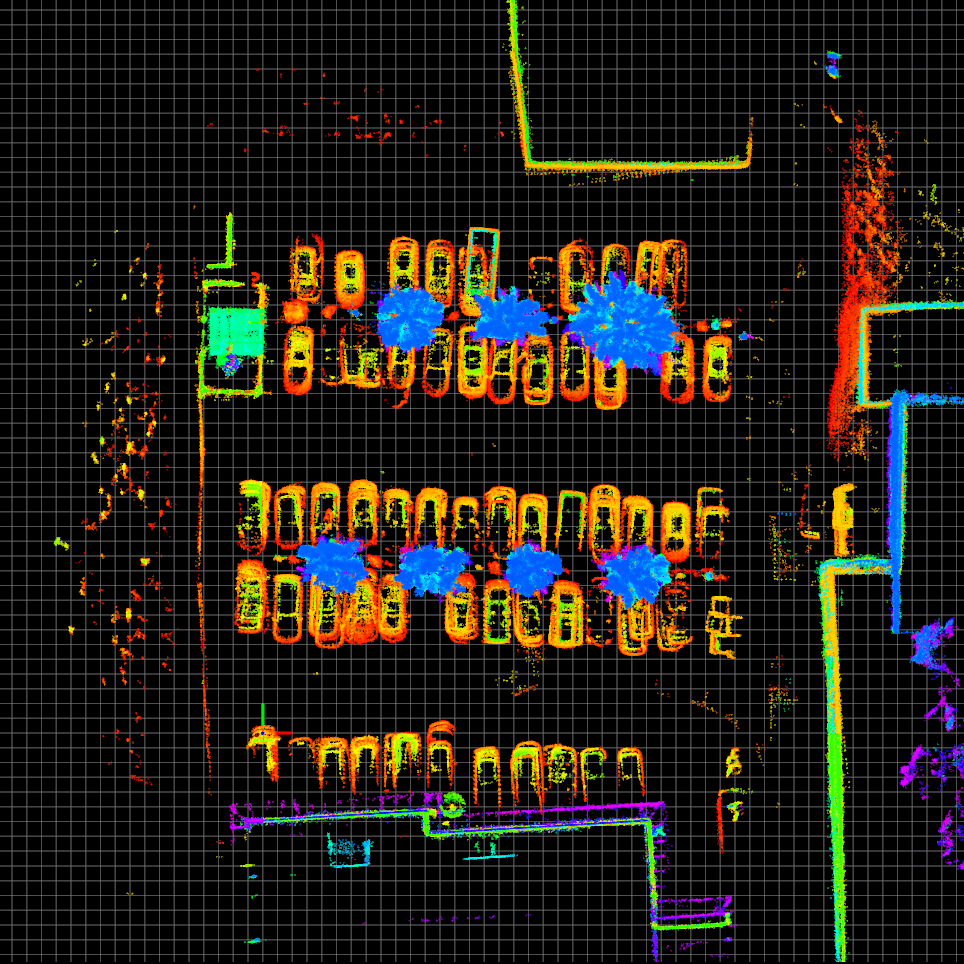
Environment and dynamic objects are visible in detail.
Static environment visible. Dynamic objects visible in contour.
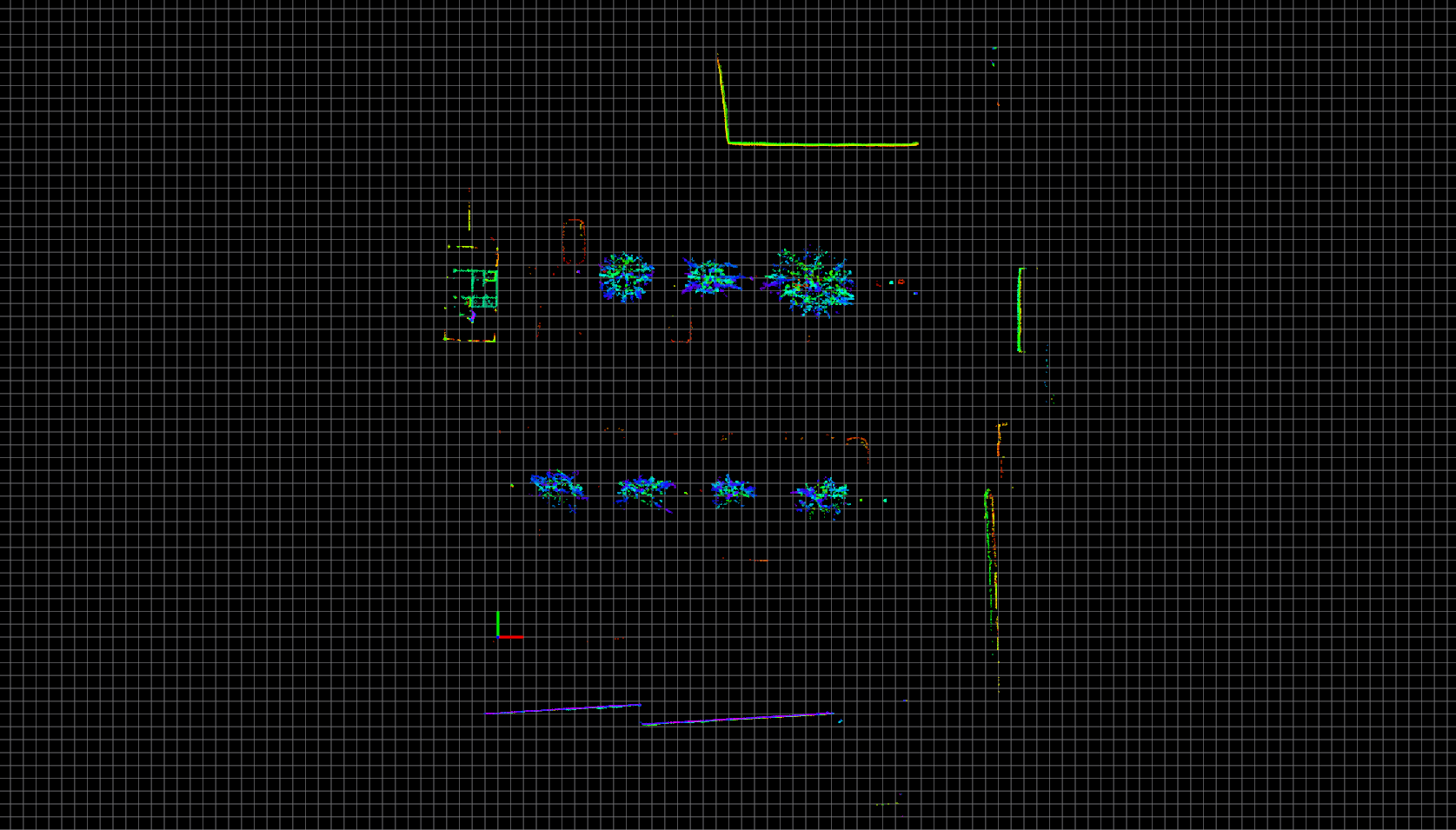
Static environment visible. No dynamic objects are visible.
Die FFG ist die zentrale nationale Förderorganisation und stärkt Österreichs Innovationskraft.
Dieses Projekt wird aus Mitteln der FFG gefördert. www.ffg.at

