Together with Virtual Vehicle Research GmbH we recorded (thanks for your walks Raphael!) a mapping dataset of the city center of Graz including the Schloßberg and the Stadtpark and make it available as Open-Data on Github. For the walking dataset we used three different sensor types, namely LiDAR (1x Ouster OS1-64, 10 Hz), IMU (XSens Mit-630, 400 Hz) and GPS (u-blox F9P, 1 Hz) and walked for about half an hour each through the deserted city center of Graz and the Schloßberg. For example the footage of the city park has a duration of 51 minutes alone.
The datasets offer anyone interested the opportunity to apply, test and compare mapping algorithms .
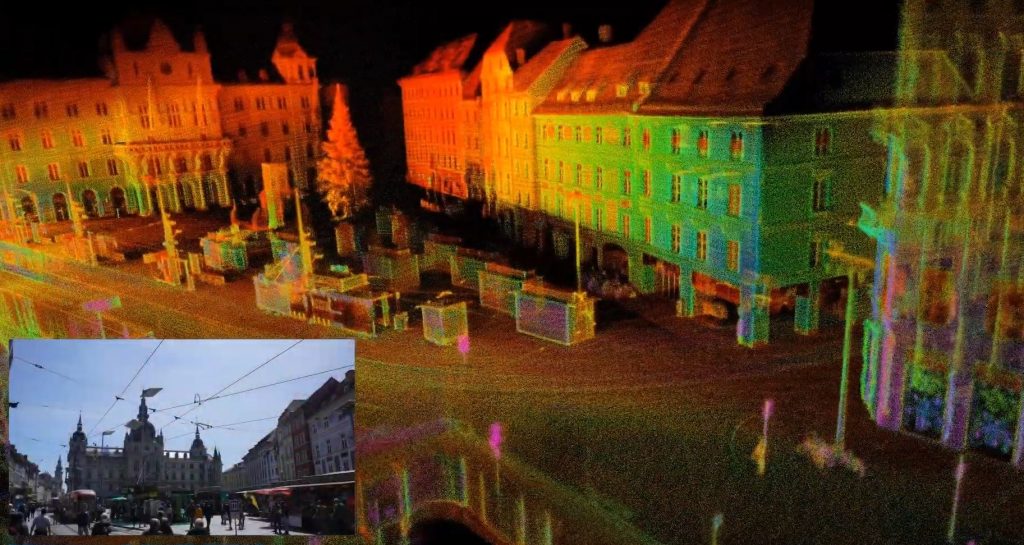
The dataset at the Schloßberg is unique, because here the so-called “Kriegssteig” (260 steps) is climbed in a “zigzag” at the beginning. The material from the city center shows buildings, facades and streets in very good quality (those who are particularly attentive can even recognise the Christmas decorations).
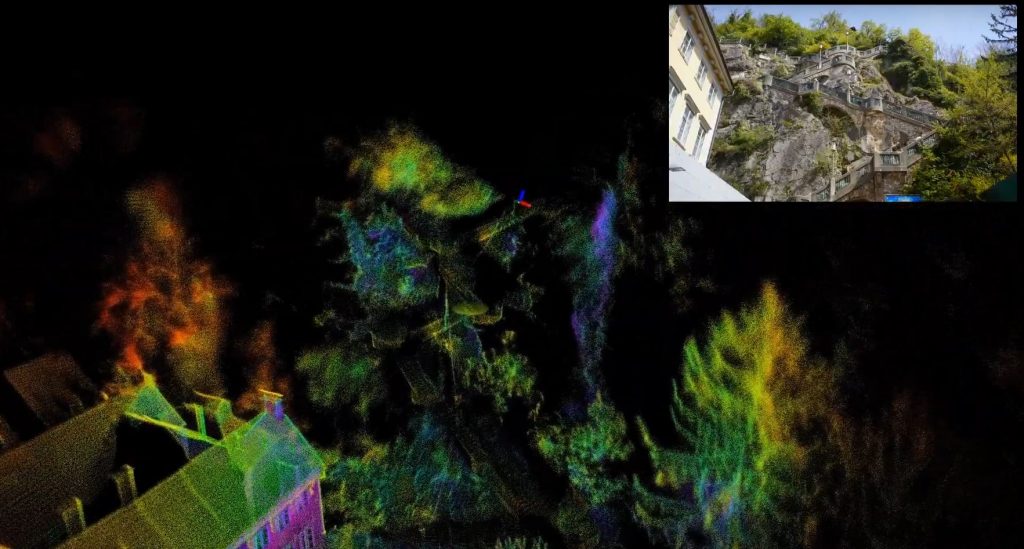
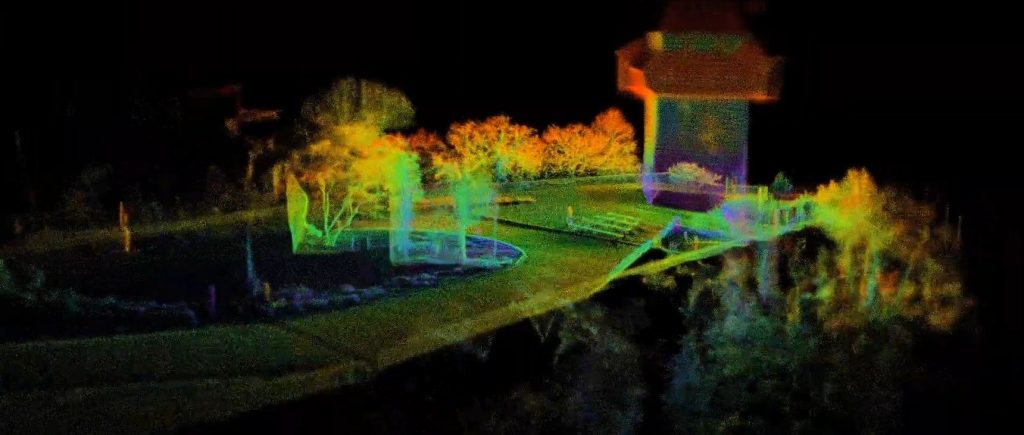
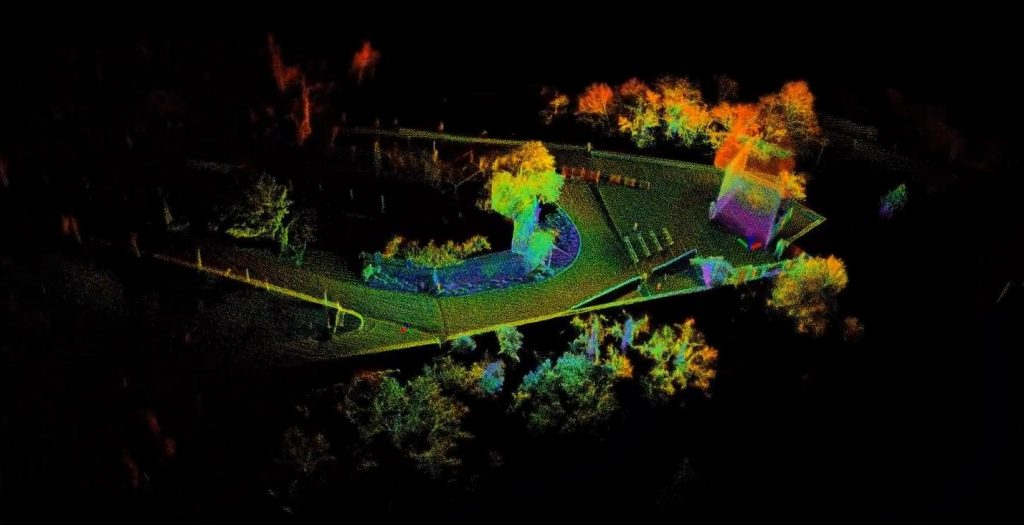
The three data sets represent quite different “difficulty classes” or terrains. The shots of the city center correspond to the typical scenarios at companies and research institutions (very flat, many buildings, street, etc.). The landscape in the city park is also rather flat, but there is naturally a lot of vegetation here (trees, bushes, etc.), which can be a certain challenge for some algorithms. At Schloßberg, on the other hand, there are larger inclines to overcome, but less vegetation and more smooth surfaces (streets, buildings…).
We have also put together a video with the most spectacular parts, you can find both links here:

