Task
Collaborations with first responders and participation in the RoboCup Rescue robotics challenge yielded experience in USAR scenarios.
Collaborations with first responders and participation in the RoboCup Rescue robotics challenge yielded experience in USAR scenarios.

Our team emerged from the student group Tedusar of the Graz University of Technology and participated in RoboCup Rescue Leagues.
Collaborations with first responders and participation in the RoboCup Rescue robotics challenge yielded experience in USAR scenarios. These include exploration of potentially dangerous environments, navigation across complex terrains, and 3-D mapping.
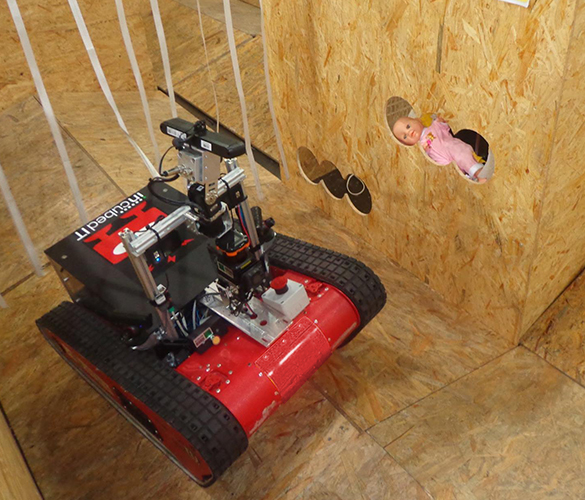
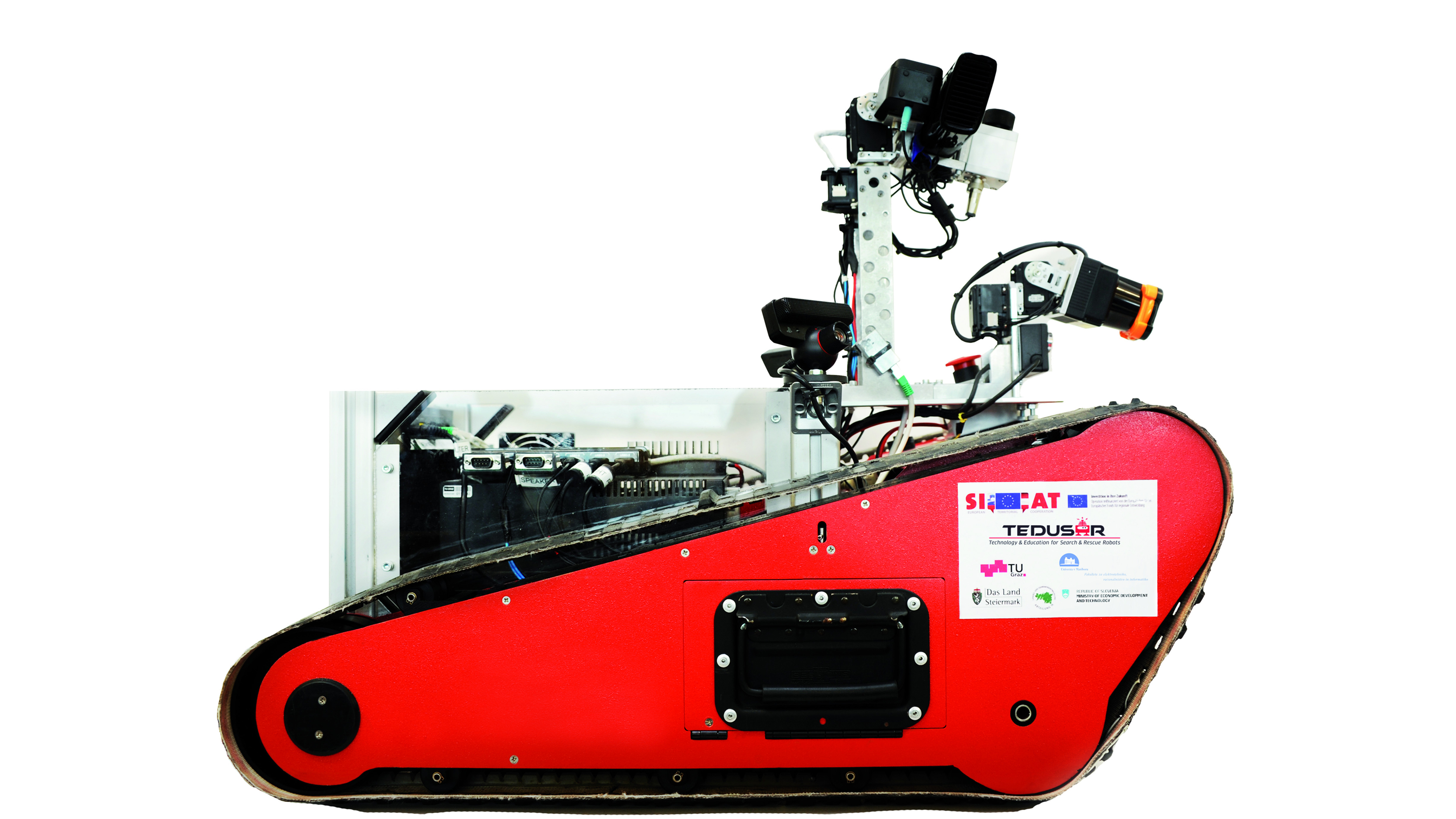
The main research aim is to develop reliable software for fully autonomous robotic systems. Wowbagger is the major competition platform and designed for exploration and victim detection. The robot is capable to operate fully autonomous by receiving higher-level goals from the operator. Our team always believed in a fully autonomous solution to achieve the best possible results.
The motto of the team: “REAL ROBOTS ARE AUTONOMOUS!”
Webpage: http://www.robocup.tugraz.at/
Facebook: http://facebook.com/tedusar
Youtube: Tedusar Channel