
RoboNav
Navigating in remote environments without functioning infrastructure is a very demanding task. However, it holds enormous potential for new technological developments and saving human lives.
As a part of the Austrian Space Application Programme (ASAP), this project aims at the development of an integrated navigation system for robots, tackling key navigation aspects such as localization, routing, and guidance in off-road scenarios, alpine areas etc., which are challenging or might be dangerous for humans.
The developed automated robot system is capable of performing transportation and maintenance tasks, offering crucial support in challenging environments.
Task
Autonomous Offroad Operation
An automated robotic system, capable of navigating in remote and challenging environments, has the potential to become a significant asset in hardly accessible areas, which are too challenging or dangerous for humans. This solution could be utilized for a wide range of potential applications/automated tasks, such as:
- Transport of materials
- Construction tasks
- Maintenance and inspection tasks
- Search and rescue missions

As a part of the RoboNav project, different mobile robots were tested and later equiped with the navigation software form ARTI. We directly expanded our software’s functionality to complex outdoor environments, aiming to develop an versatile outdoor navigation system.
Approaching this challenge, the following real-world goals were defined:
- Predictable planning decisions
- Fast reaction time
- Increase of traveling speed
- Efficient computation
To overcome the challenge of limited map data, ARTI developed an automatic route generation system that eliminates the need for manual waypoint entry, bypassing both teaching and manual tools. This approach was highly efficient and time-saving, enabling navigation across vast areas.
Our modular AI Kits‘ advanced technology enables almost any ground-based robot to be equipped with autonomous capabilities, a crucial factor that facilitated the use of our software in this project.
Selecting and developing the appropriate platform is essential for such projects. It’s important to accurately assess and meet hardware requirements to provide a reliable foundation for operations in alpine and extensive outdoor environments.
For RoboNav, we evaluated four mobile robot platforms with distinct mobility characteristics for test cases and data collection. These robots include both differential and Ackermann steering types, utilizing wheels, tracks, and actuator-based locomotion like feet. Their varying sizes significantly affect mobility in different environments such as woods, greenlands, and streets. During the testing phase, we identified the strengths and weaknesses of each platform across various terrains. Initially, all platforms were remotely operated in specified areas to generate a motion profile database. This database aids an algorithm in preemptively assessing terrain for autonomous operation, considering the robot’s capabilities. Additionally, these tests provided insights into the most suitable robot type for specific applications.
The team utilized advanced mobile robotic platforms such as HAWE Mattro Rovo2/3, Clearpath Husky, Boston Dynamics Spot, and Enetic Mercator. After thorough evaluation, HAWE Mattro’s Rovo was selected as the optimal solution for RoboNav‘s demanding outdoor application. While numerous exceptional robots exist globally, we assessed a select few. Understanding the variations in motion capabilities and performance for outdoor tasks was crucial.

Opposite to humans, robots do not have superior perception and motion skills and therefore require detailed set of instructions to perform tasks. When it comes to mapping an area, two separate challenges are to be considered:
Global Map – Provides a rough overview of an operating area, which computationally can be a challenging problem, especially for very vast outdoor areas.
Local Map – Focuses on delivering detailed information in the vicinity of the robot and integrates it with the robot’s local perception.
The challenge in vast outdoor environments involves ensuring highly accurate localization, which is essential for initial navigation. Besides, navigating these areas requires rapidly processing complex information to support high-speed travel and the identification of safe, alternative routes.
In dense, highly engineered environments like cities or highways, such detailed maps are usually already available for entire areas. However, when it comes to remote unstructured areas, which RoboNav seeks to tackle, these maps are usually unavailable and must be generated. This is to be done prior to the deployment of the robot and can be done in multiple ways, for instance with the robot itself or by relying on an airborne system. Such extensive pre-mapping is very costly and poses as the main challenge for navigation in vast unpopulated areas.
Automatic calculation and definition of potential paths
Two main innovations will be addressed in the course of this project:
Robot characteristics tailored to specific operational environments have been collected, comparing the mobility of various locomotion types (tracked, differential drive wheeled, Ackermann steering wheeled, and four-legged robots). This comprehensive analysis covers essential locomotion for outdoor operations, necessitating a one-time data collection for each new robot platform with distinct specifications.
These characteristics of the robots can be expanded in future projects to more accurately reflect individual locomotion capabilities, particularly for different biomes. However, it already provides a solid foundation for understanding and improving these capabilities.

Autonomous Offroad Operation
Developing a cutting-edge navigation pipeline, designed for vast, unstructured environments. The innovative approach ensures rapid deployment, enhances movement speed, and facilitates automatic rerouting without the need for an active remote connection. This paves the way for seamless, efficient operations in even the most challenging terrains.
Rapid Deployment
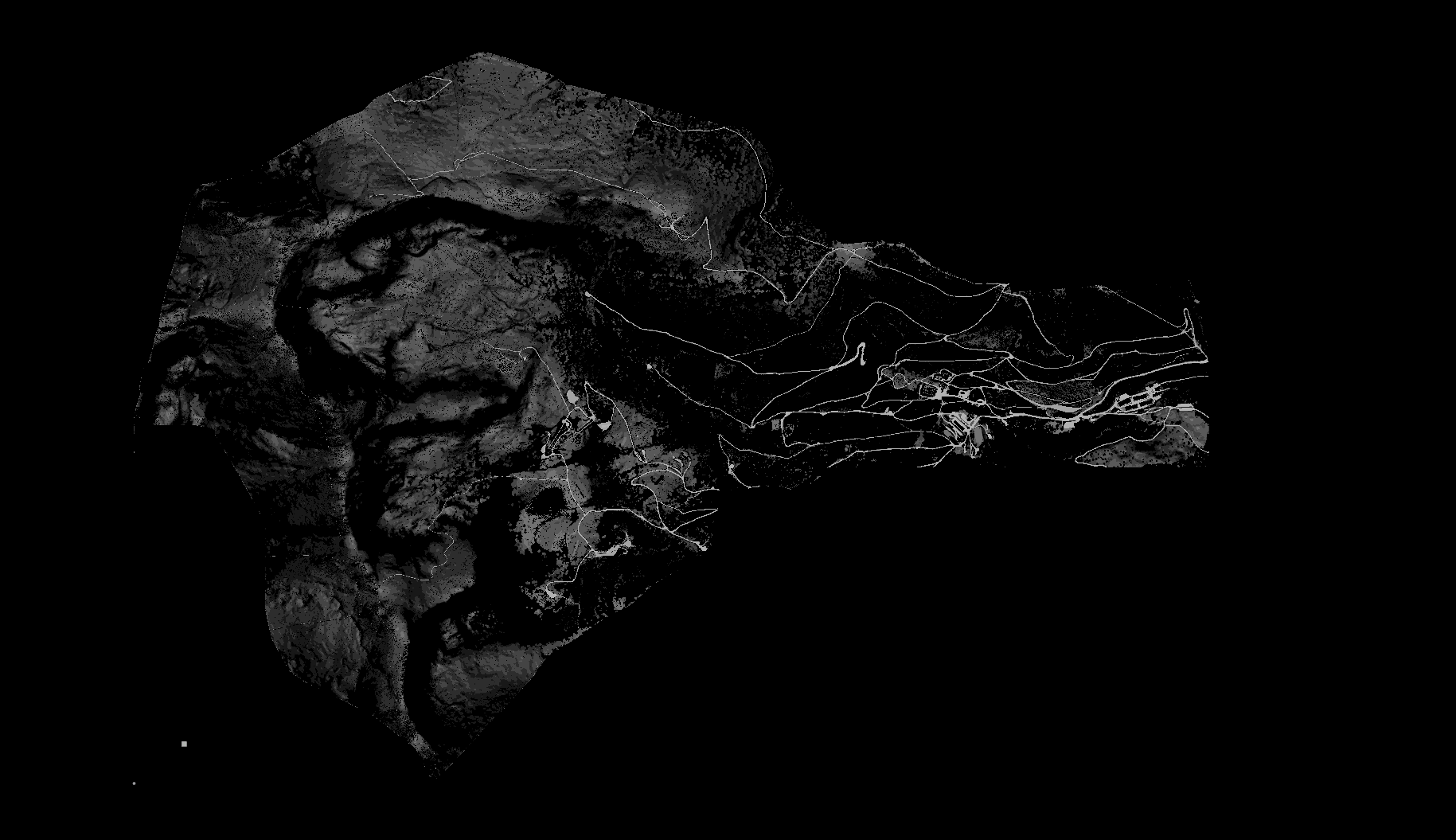
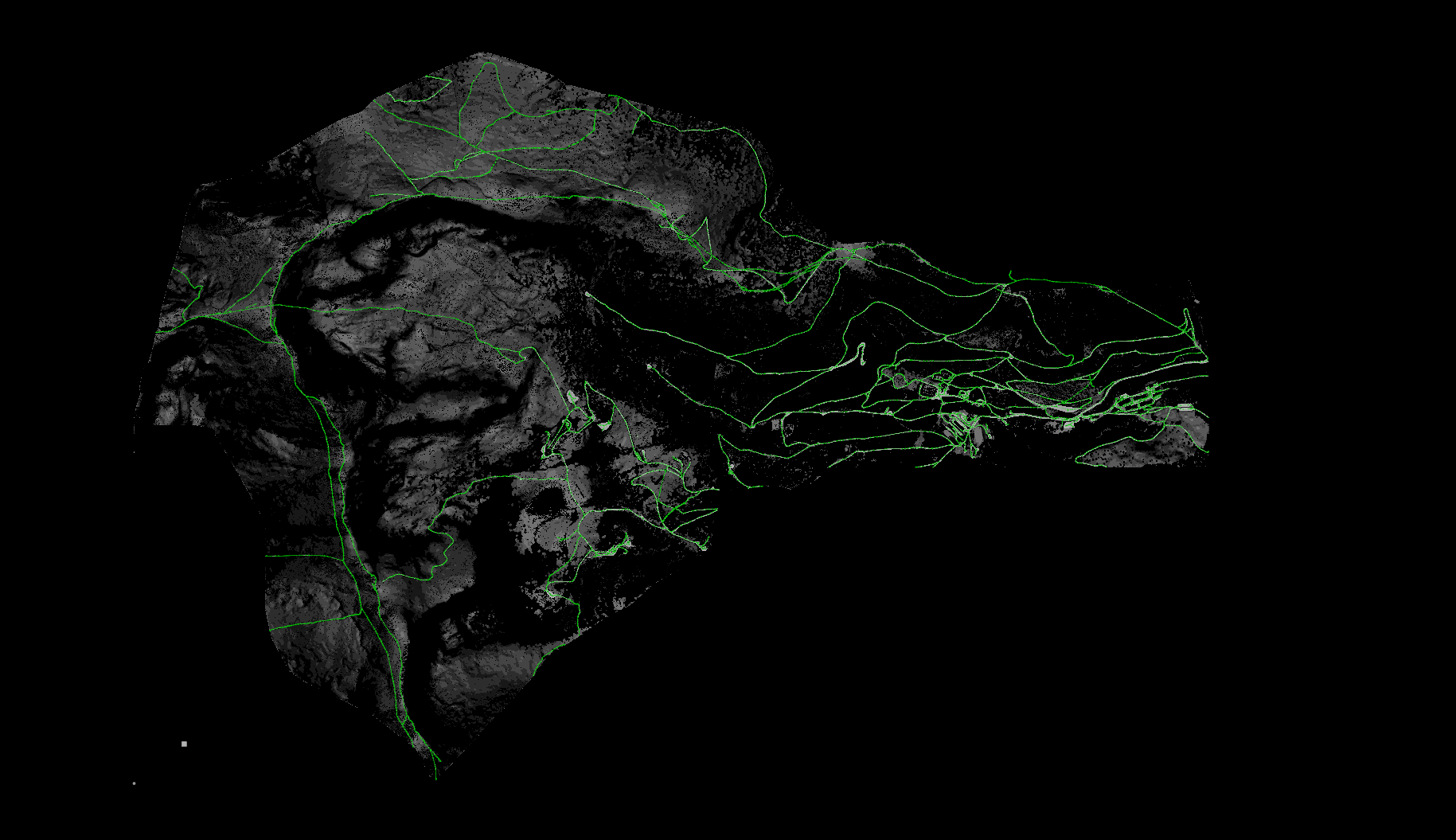
Leverage satellite or aerial imagery for automatic route generation, bypassing the need for manual work like teach-in. This smart navigation considers the robot’s locomotion capabilities, ensuring navigability for various robot types. This method significantly boosts robot deployment efficiency, ideal for covering large distances.
Proof-of-Concept
The complete workflow was successfully showcased through multiple field trials in relevant operational environments. The final evaluation occurred at the Seetaler Alpen, demonstrating the system’s capability to cover a vast 22 square mile area with a 70 km automatically created navigation layout, proving the efficiency and scalability of our navigation.
Austrian Alpine Robotic Trials (AART 2023)
European Land Robot Trial 2022 (ELROB) – 1st Place
The robot platform and the navigation stack developed in the RoboNav project were used by the TEDUSAR Field Robotics Team to win in the category Mule.
Challenge was to shuttle as much cargo as possible between two points in a large outdoor area. No prior path information was provided, and further obstacles were added.
Locomotion Data Recording at the Seetaler Alps (Austrian Alpine Robotic Trials – AART 2021)
Locomotion profiles of different robots were recorded, with the main goal of examining their properties and usability in alpine terrain. They were equipped with a uniform mounting frame, containing various sensors, in order to uniformly record the locomotion measurements. With the help of this data, motion profiles can be compared, which allows for optimization of the autonomous path planning and navigation.
RoboNav’s Hardware and Software Part of the Amadee 2020 Mars Simulation
Mercator, the robot platform used in the RoboNav project and the navigation approach developed in the RoboNav had been tested successfully during the Amadee Mars analog simulation in the Ramon Crator in the Negev desert, Israel. The system was deployed in the Exploration Cascade where exploration is based on earth observation data that are used for robot navigation and refined during the process by data from an UAV and the ground robot.
In course of RoboNav, multiple research papers have been created and published, with the earliest being written in 2020.
Austrian Alpine Robotic Trials | © Bundesministerium für Landesverteidigung
How an autononomous transport vehicle operates | © TU Graz
ELROB Mule Challenge 2022
![]()
Disaster Competence Network Austria
As a non-profit and open association, the DCNA is an academic contact and cooperation partner for aid and response organisations as well as decision-makers from the public and private sectors. The DCNA builds bridges between science and practice.
![]()
pentamap GmbH
The company operates in the field of Geoinformatics and remote sensing. They develop applications for the requirements of complex data modelling. From the development of mobile map apps to the processing of LIDAR data and the analysis of satellite images, they cover a wide range of use cases.
![]()
Austrian Ministry of Defence
The Austrian Federal Ministry of Defence is the ministry in charge of all matters relating to military affairs or protection of the inhabitants of Austria. They are not only responsible for maintaining external and internal security, but also act in the event of natural disasters or major accidents, which is one of the overlapping points with RoboNav.
TU Graz – Graz University of Technology
The university was founded in 1811 and is the oldest science and technology R&E institute in Austria. It has more than 13,000 students and approximately 2,000 students graduate every year. According to various rankings, TU Graz is one of the best universities in the world in many areas. Directly involved in the RoboNav research are the Institute for Software Technology and the Institute of Geodesy.