CHARbO
With the increasing number of electric vehicles, there is a growing need for innovative charging solutions that are convenient, efficient, and accessible to all electric car owners.
Traditional charging methods require drivers to manually plug in their vehicles, which can be inconvenient and time-consuming, or even impossible to do for those with physical disabilities or limited mobility.
Task
Mobile Autonomous Charging Robot Prototype for BEVs
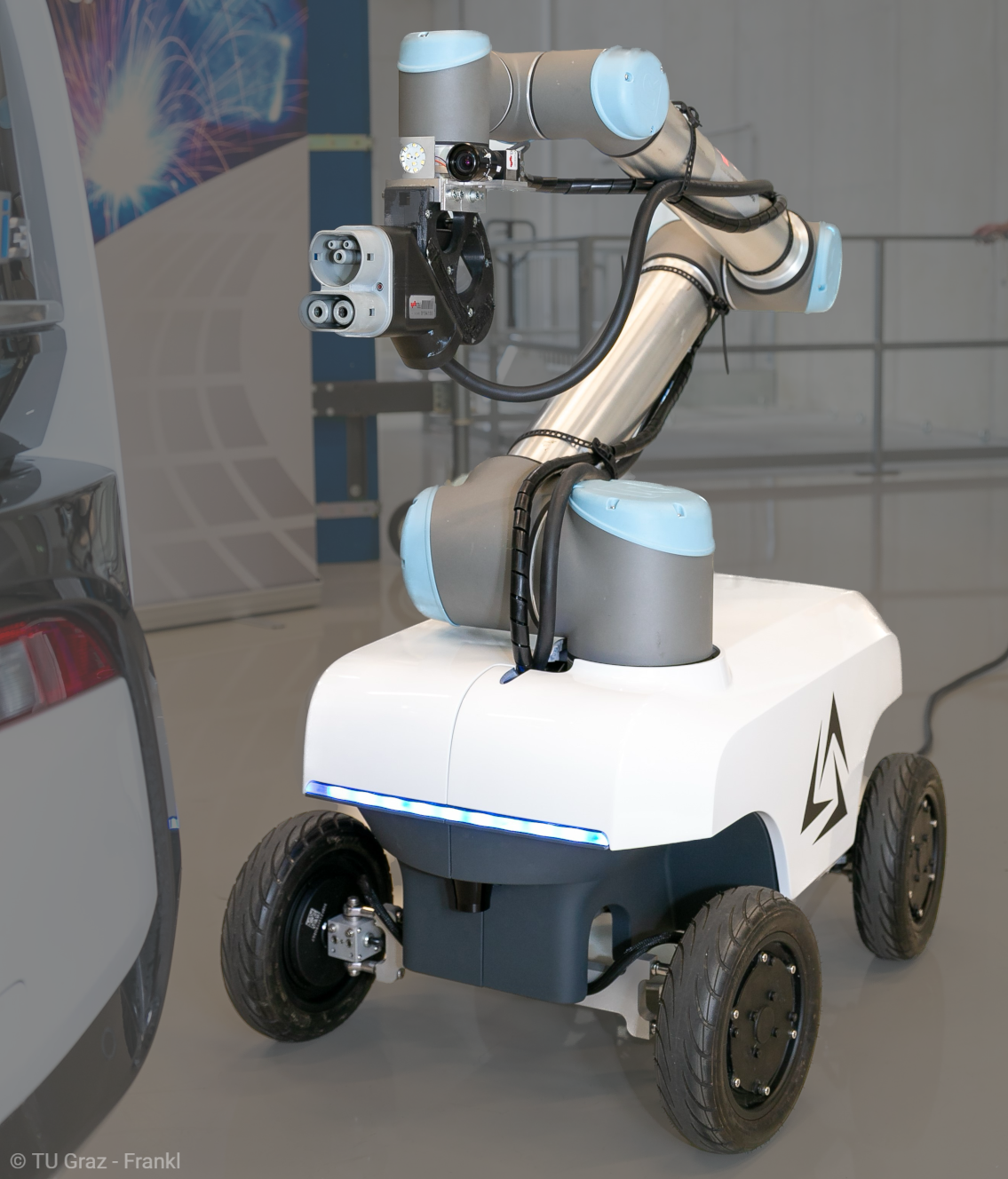
Together with the Graz University of Technology (Institute of Automotive Engineering) and ALVERI GmbH, ARTI worked on solving this problem. The combined effort of all parties resulted in CHARbO – an autonomous mobile charging robot. Equipped with advanced sensors and algorithms, it autonomously navigates around obstacles to locate and supply the EV with energy, completely without the need for human intervention.
This demonstrator mobile autonomous charging robot for battery electric vehicles (BEVs), incorporates a range of essential competences such as:
- Automated charging solutions
- Robotics
- Self-driving platforms
- Design and construction
- Energy supply
- Charging infrastructure
- Integration into comprehensive mobility concepts
- Integration into traffic infrastructure
By increasing charging efficiency, reducing infrastructure costs and eliminating the need for manually handling charging cables, CHARbO contributes to making environmentally friendly electromobility even more appealing.

Demo of the prototype at the Graz University of Technology | © TU Graz – Frankl
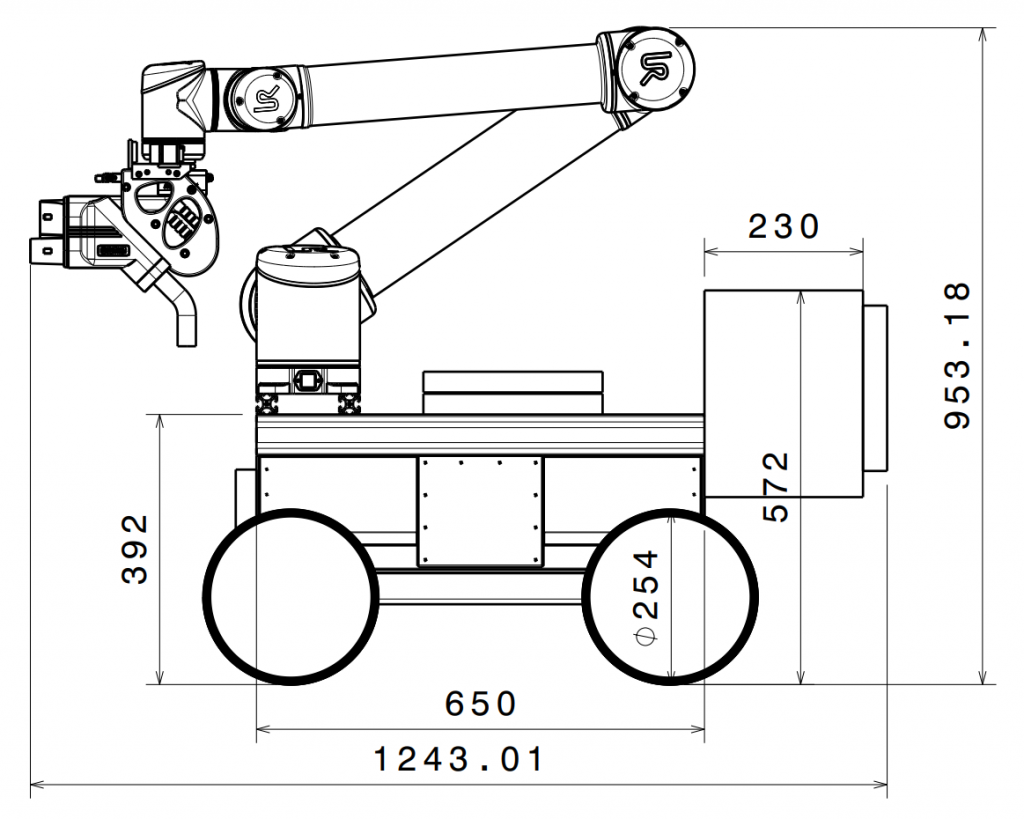
Technical Blueprint of CHARbO | © ARTI
CHASI
The base used for CHARbO to be built upon is CHASI – ARTI’s self developed robotic platform. Since it is a modular platform which can be adapted for a range of applications it is a perfect fit for the project. Equipped with appropriate software, CHASI can move autonomously at speeds of up to 20 km/h. Furthermore, it has safety mechanisms that enable safe operation in environments where non-experts may be present.
CHASI features a transportation-oriented design, capable of traversing both urban and rural landscapes while carrying a load. When confronted with obstructions, CHASI can efficiently navigate by identifying alternate routes and choosing the optimal one. The platform’s core structure is readily scalable and can be modified for various applications with minimal effort. The experience, ARTI gained from creating CHASI, served as a perfect starting point for a modified version which covers all of the technical requirements of the project.
In order to enhance CHASI’s functionality and make it fit for the application, the team integrated a collaborative industrial robot arm with the support of the TU Graz Institute of Automotive Engineering’s expertise in industrial loading robots. ALVERI was responsible for developing the overall concept and usability experience as well as planning application scenarios.

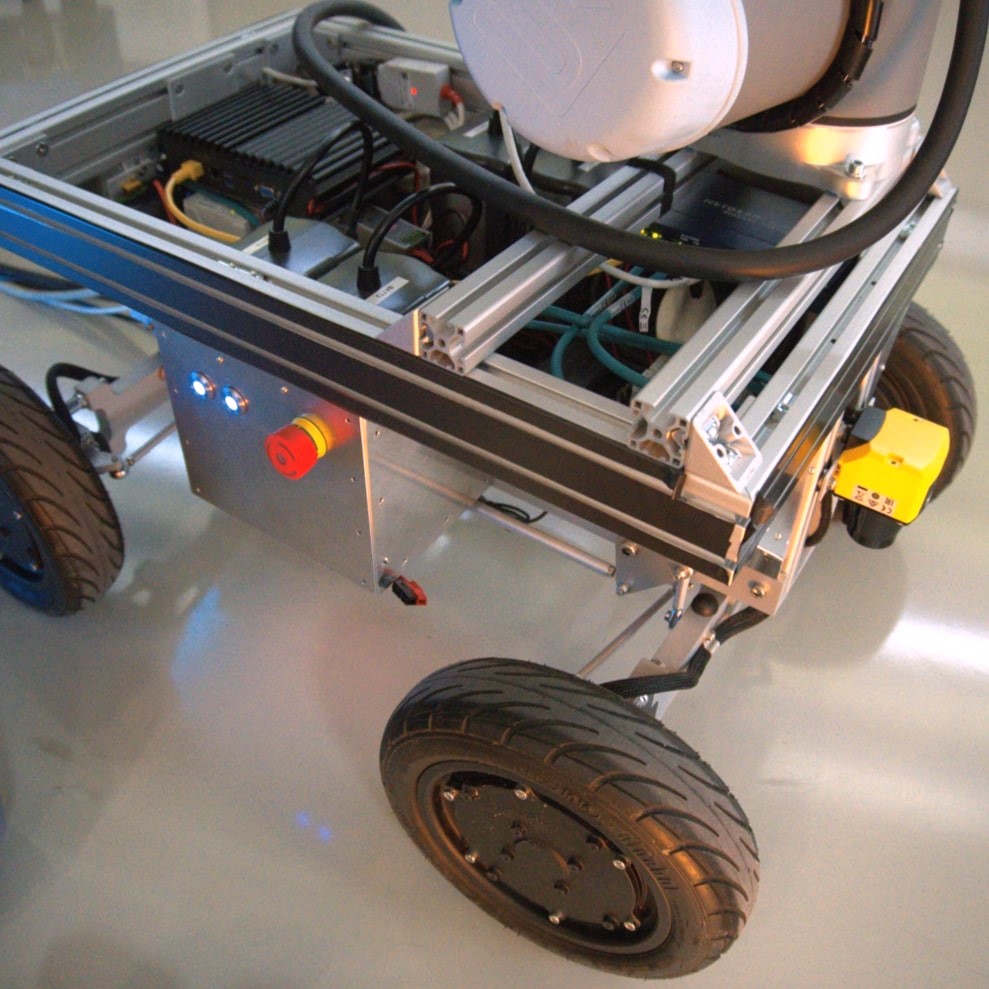
Uncovered version of CHASI | © ARTI
Specifications:
Weight: 60kg
Dimensions: 100 cm x 60 cm x 100 cm
Speed Maximum / Average: 10 km/h / 5-7 km/h
Payload: 80 kg
Range: 25 km
Localization and Navigation
One of the key tasks, which had to be fulfilled before any charging was possible, is getting CHARbO to the desired electric vehicle. Additionally, this had to be done with great care and precision, in order to make the alignment of the robotic arm with the power socket possible. Such tasks of making the robot autonomously reach its destination, is what ARTI does best.
To make CHARbO capable of this task, CHASI was equipped with ARTI’s AI Kits, whose architecture is capable of traversing in any environment, both indoor and outdoor, while maintaining the required level of precision. Equipped with this software, CHARbO continuously evaluates data comming provided by the laser scanners in order to detect and process potential obstacles. When such an obstruction or change in the trajectory is detected, the software can efficiently navigate and reroute by identifying alternate passages.
The combination of CHASI‘s versatile applicability and the exceptional capabilities of our AI-Kits proved to be a superb solution for this use case.

CHARbO approaching an EV | © TU Graz – Frankl
Safety
The technical capabilities of both our hardware (CHASI), as well as our software (AI-Kits), were successfully tested in regard to safety. This is a crucial matter, since this particular use case demands the robot to operate in a mixed environment. All movements and operations of the robot had to be done while continuously monitoring and assessing the surroundings for any harm causing threats.
To achieve this high standard of safety and maintain it throughout the process, several safety mechanisms were integrated into CHARbO, which allow for a precise and safe operation.
CHARbO’s robotic arm, the Universal Robotics UR10, is made to be used for collaborative purposes and was designed with mixed, human-machine environments in mind.
Its enhanced safety features, such as force sensors, can recognize potential collisions and prevent accidents from happening. Eventhough highly unlikely, the posibility of an immediate safety stop has been integrated.
All this contributes to a high standard of safety and ensures effortless operation in the given environment and makes it clear why all relevant indicators and tests proved that CHARbO‘s safety mechanisms are well-suited for mixed, human-machine environments.
Video report about CHARbO | © TU Graz
Insight into the Development Process

charbo_poc (2)
charbo_poc (3)

charbo_poc (1)
Project Partners
![]() ALVERI
ALVERI
The company was founded in 2019 by brothers Ehsan and Jakob Zadmard and offers complete solutions in the field of charging management for private individuals and companies. They bring experience in usability and application scenarios to the project and are also responsible for the design of the product. ALVERI is still working on the further development of CHARbO.
TU Graz – Graz University of Technology
The university was founded in 1811 and is the oldest science and technology R&E institute in Austria. It has more than 13,000 students and approximately 2,000 students graduate every year. According to various rankings, TU Graz is one of the best universities in the world in many areas. CHARbO research is anchored in the field of expertise “Mobility and Production”, one of five strategic research focuses of TU Graz.
Links